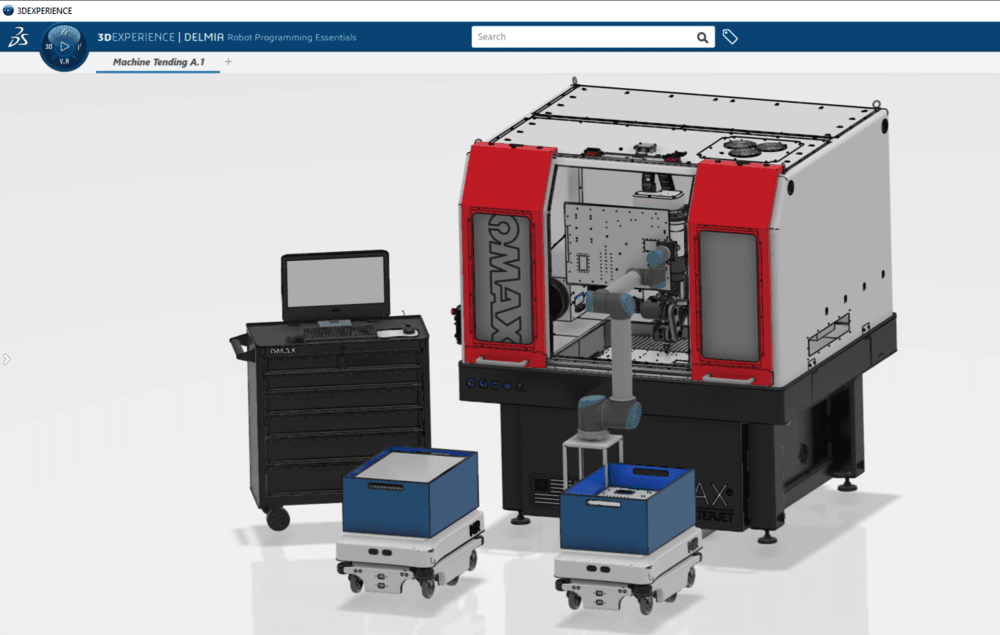
Machine tending is one of the most common uses for robots and cobots in today’s market. Whether you’re looking to fully automate a system or to have a cobot work collaboratively with an operator, the benefits of automating repetitive tasks can be seen and felt immediately.
How Are Real World Companies Using 3DEXPERIENCE DELMIA?
Robots at Work used the 3DEXPERIENCE platform and DELMIA to double their revenue in their robotics business line. They use DELMIA to simulate and test entire production lines before doing any physical implementation.
And the beauty brand, L’Oréal, uses DELMIA across 30+ factories worldwide. It’s also heavily used in the automotive industry to streamline assembly lines.
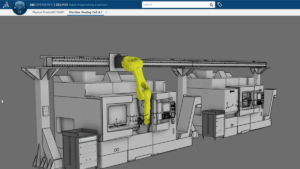
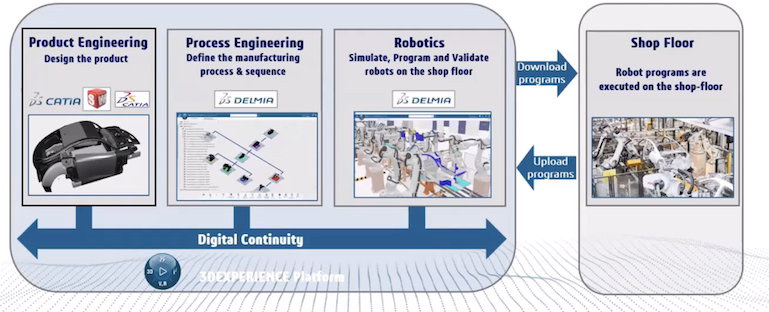
Companies primarily use 3DEXPERIENCE DELMIA to create 3D virtual twins of their manufacturing floors in order to optimize layout, simulate, and test production lines and equipment (including cobots and robots) as well as test robotics offline.
The following are the three biggest reasons companies are using DELMIA:
- Lights-Out Manufacturing: Enable autonomous “hands off” tending of other machines with robots to increase scale and run lights-out operations.
- Virtual Robotic Programming and Advanced Simulation: Program and test robotic tasks in simulated environments to optimize processes or program robots offline before running in a production environment.
- Digital Twins: Use virtual twins to identify inefficiencies and errors preemptively.
Lights-Out Manufacturing & Automation of Robots, Cobots, and CNC Machines
Automating loading and unloading CNC machines allows your workforce to be more efficient and manage more equipment with less headcount but the advantages don’t stop there.
Robots and CNC machines can also run unattended through the night, allowing for greater throughput for your facility without additional labor costs.
Once unloaded, menial but important tasks like deburring can be performed by the robot, or parts can be automatically loaded onto a conveyor or placed into a CMM for quality control.
If the part fails the quality inspection and if you’re running tool breakage detection in your machines but don’t have the tool capacity to store extra tools, the robot could be programmed to load the tools to keep that machine running. As with any tool, once you have it, you find other uses for it!
Typically, new users will steer towards using the teach pendant for programming their robot, and for simple tasks such as load and unload this may be sufficient, particularly if production runs are long.
In these situations, you may be able to get away with a handful of robot programs to do the bulk of the work.
Virtual Robotic Programming, Advanced Simulation, & Offline Programming
If your machine cycle times are long, your robot could sit idle for a while when you could be using it for other tasks. Having an investment sitting idle is a primary reason people invest in robots in the first place, so doesn’t it make sense to maximize the investment in your robot and put it to work while the machine is running?
But taking the robot offline to program it for other tasks can quickly lead to those time savings vanishing. Often this occurs in high-mix production, where there may be many different parts that require different tasks or tweaks to the robot program to work and that is where offline robot programming tools like DELMIA’s 3D Robot Programmer role can keep your CNC machines and your robots running efficiently.
When you first get your robot, one of the initial challenges, aside from not damaging it while being as giddy as a kid in a candy store, is placement.
Where’s the optimal placement that allows you to reach everywhere you need it, but not get in the way? You could use one of the 1400+ robot kinematic models in the supplied library and use the virtual teach function to jog the robot around but DELMIA can help you decide faster.
Simply program the robot where you need it to go, and then run Autoplace. You’ll define a grid of possible locations, and it will run an analysis and tell you all the grid positions that will work within the robot’s limits.
Using Digital Twins and Training Your Cobots and Robots
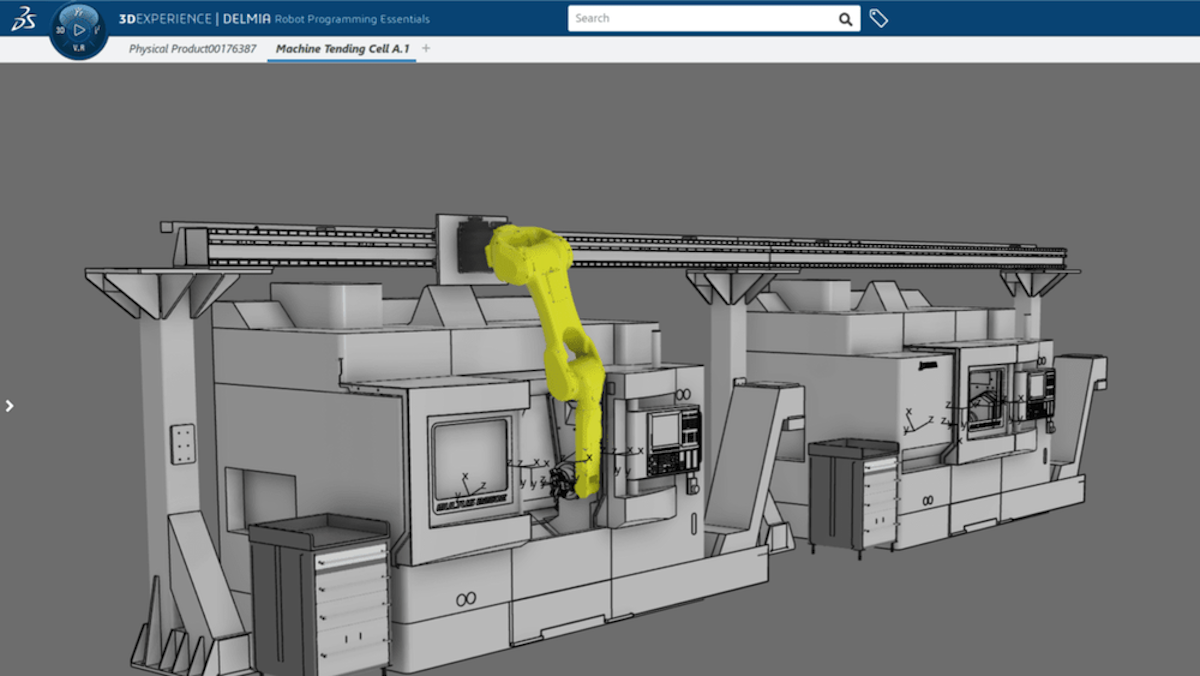
Whether you choose to buy or make your own end effectors, DELMIA Robot Programmer comes with the ability to define kinematics so that you can create the full digital twin of the cell.
Do you require multiple TCP points on your end effectors for gripping, pressing buttons, and moving objects? No problem. Multiple tool profiles can be created for the end effector, and you simply choose the relevant TCP point when programming the robot’s movements.
As for programming, you can either use the virtual teach function, just like you would with the real robot, grab it, and move it around or if you’ve got known positions to work, you can import these from Excel and generate a series of robot motions based on specific tag locations.
It also supports PLC logic allowing you to program IF/THEN, DO/WHILE, GOTO among others to ensure that your logic is proven out virtually so that downtime is minimized.
Learn More about DELMIA’s Robotic Solutions
DELMIA’s robotics solution means users can verify complex work cell systems using a digital twin allowing businesses to automate their systems and processes and improve overall efficiency.
Have questions? Contact us and we can learn more about your application and discuss how DELMIA can streamline your manufacturing. In the meantime, get our recent Industry 4.0 eBook: Unlock the Future of Manufacturing.